AUTOMATA SMC4: Realtime-Ethernet Stepper Motor Controller für die Additive Fertigung
Cannon-Automata, ein weltweit agierender Hersteller von Automatisierungsgeräten mit Entwicklungs- und Produktionsstandorten in Deutschland und Italien stellt den SMC4 RT-Ethernet Stepper Motor Controller vor. Der SMC4 Stepper Motor Controller mit RT-Ethernet Interface eignet sich besonders in Robotik-Anwendungen oder 3D-Druckern als Alternative zu teuren Servoantrieben.
Mit den vielfältigen Betriebsarten der SMC4 Schrittmotorsteuerung lassen sich anspruchsvolle Aufgaben nun auch schnell und einfach ohne großen Programmieraufwand in EtherCAT oder Sercos Netzwerken umsetzen.
Der Stepper Motor Controller mit EtherCAT® oder Sercos® Interface unterstützt die standardisierten Antriebsprofile der beiden Protokolle. Alle für den Betrieb an CNC- oder Roboter-Steuerungen benötigten Funktionen sind vollständig implementiert. Dazu gehören u. a. zyklische Geschwindigkeits- oder Positionsvorgabe, Positionierfunktionen und verschiedene Homing-Modes. Der Einsatz in anspruchsvollen Motion-Anwendungen mit interpolierenden Achsen (z. B. drei-Achs und fünf-Achs Bearbeitungsprozesse) ist so problemlos möglich.
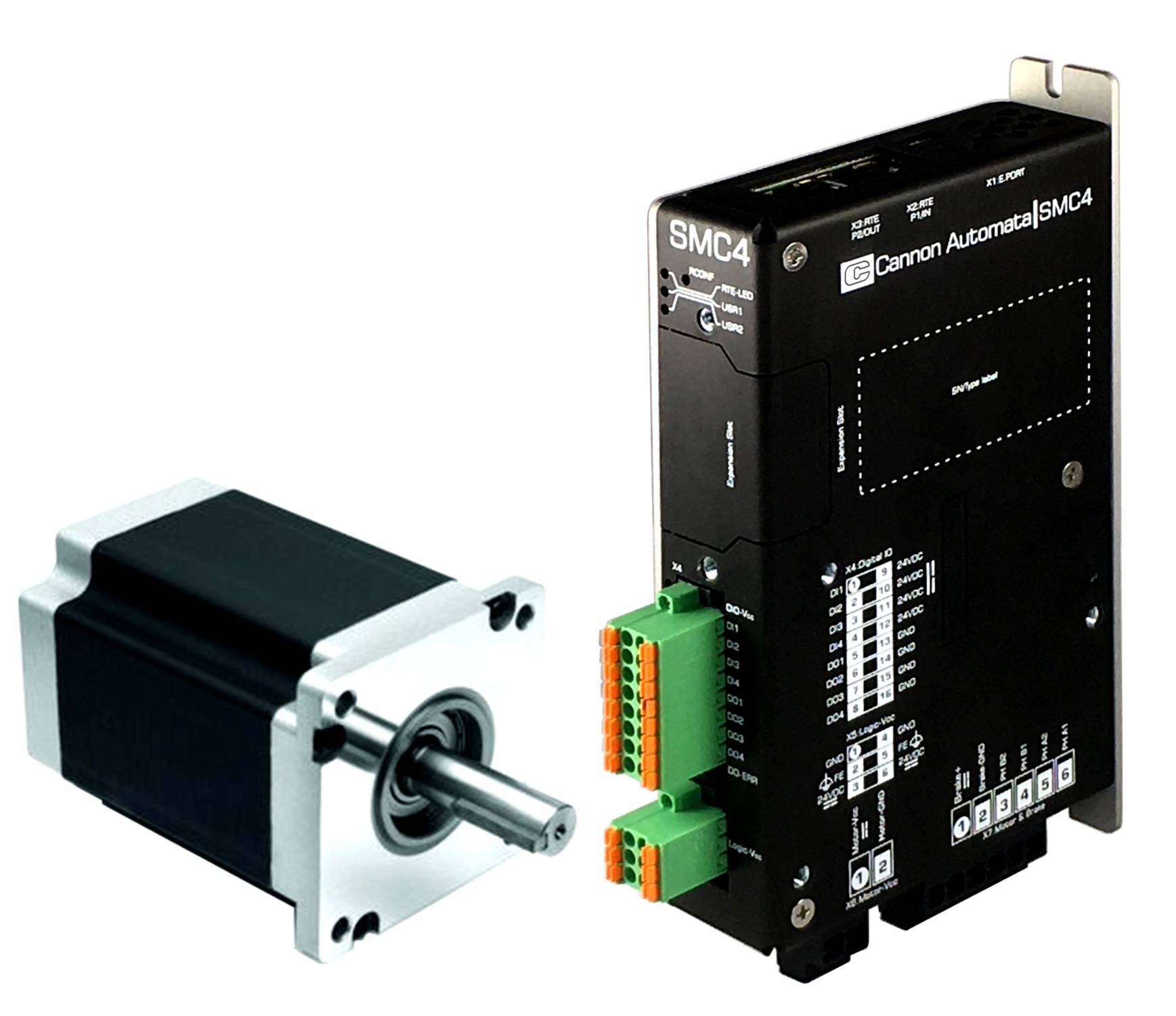
Die Onboard-I/Os erlauben die Realisierung einer kompletten Positionierachse mit Freigabe- und Statussignalen, Endschalter- und Referenzschalter-Eingängen sowie Eingängen für die sichere Abschaltung der Endstufe. Das Schrittmotor-Interface ist für 2-Phasen Schrittmotoren mit bis zu 256 Microsteps bei 10 A Phasenstrom (12 A Peak) und 48 VDC-Versorgungspannung ausgelegt. Für komplexe Lageregelaufgaben stehen Erweiterungsmodule mit Interfaces für Inkremental- oder Absolutencoder zur Verfügung.
Für Mehrachsanwendung kann die SMC4-Schrittmotorsteuerung um eine zweite Endstufe mit identischen Leistungsdaten erweitert werden. Diese Option ermöglicht den Betrieb von zwei Achsen über eine Kommunikationsschnittstelle und spart so Kosten.
Teilen: · · Zur Merkliste